|
目前市场上能看到五花八门、各种各样的自动驾驶技术和名词,但使用ADAS的配置概念(AEB、ACC、LKA、APA等)已无法完整描述这些自动驾驶系统的功能场景,因此有必要用其它的概念体系进行替代,本系列将对此进行讨论。
一、驾驶任务基本概念
驾驶汽车的任务包括对主要信息的接收工作以及对信息作出反应。在一般情况下,驾驶员或系统一边不断地处理信息、一边驾驶汽车。
驾驶任务可分为三个处理阶段:①信息接收(感知);②信息处理(认知);③信息交付(动作)。相关模型见下图1。
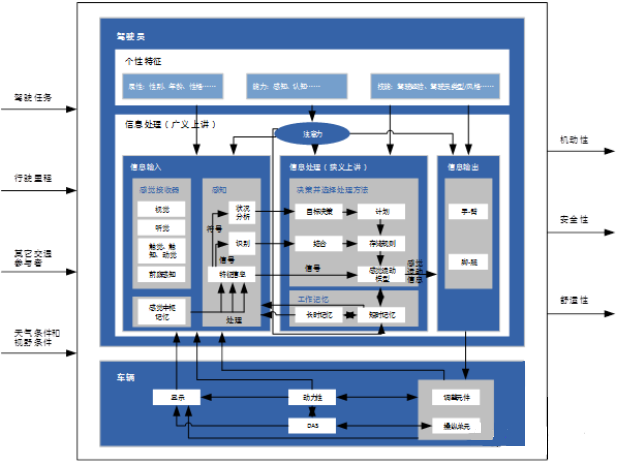
图 1 驾驶员-汽车-环境系统模型
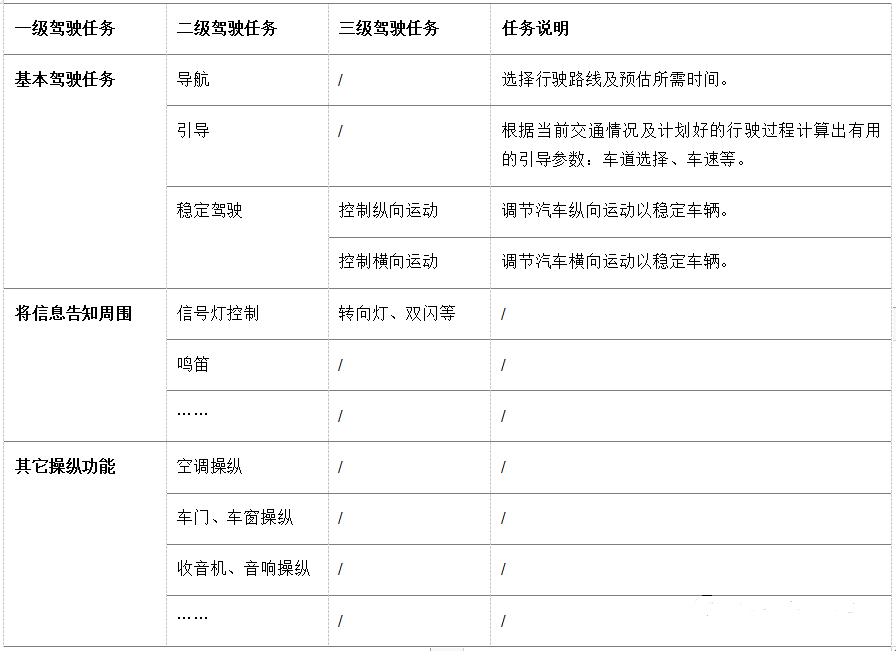
对驾驶任务进一步分解,可得到下表1。需要指出的是:驾驶员或系统可同时进行下表1中的几项驾驶任务,其中“基本驾驶任务”为首要驾驶任务,也是驾驶自动化等级划分的主要依据,其它驾驶任务为第二、第三驾驶任务。
表 1 驾驶任务分解
二、驾驶自动化分级与动态驾驶任务
1) 驾驶自动化分级方法
SAE J3016标准划分了从L0到L5的六个车辆驾驶自动化级别,为现在行业通行的驾驶自动化分级标准。SAE J3016通过以下三个维度进行了驾驶自动化的分级:
§
设计运行范围ODD
§
设计时确定的驾驶自动化功能的本车状态和外部环境,包括车速、道路、交通、天气、光照等。
§
动态驾驶任务DDT
§
属于基本驾驶任务范畴,除策略性功能外,完成车辆驾驶所需的感知、决策和执行等行为,包括但不限于:
- 车辆横向运动控制;
- 车辆纵向运动控制;
- 目标和时间探测与响应;
- 驾驶决策;
- 车辆照明及信号装置控制。动态驾驶任务包括所有实时操作和决策功能,由驾驶员或驾驶自动化系统完成,或两者共同完成。
§
动态驾驶任务接管DDT fallback
当发生驾驶自动化系统失效、车辆关联系统失效或即将不满足设计运行条件时,由驾驶员/系统执行动态驾驶任务、使车辆达到最小风险状态的行为。
SAE J3016将动态驾驶任务DDT和动态驾驶任务接管DDT fallback分配给驾驶员或自动驾驶系统,根据责任分配及设计运行范围ODD是否存在限制。
2) 动态驾驶任务DDT的拆解SAE J3016中给出了对动态驾驶任务DDT的进一步拆解,见下图2

图 2 动态驾驶任务DDT拆解
从上图2中可以看出,动态驾驶任务的最内层为:车辆运动控制Basic vehicle motion control,包括车辆横向运动控制与车辆纵向运动控制两部分:
车辆横向运动控制:动态驾驶任务中沿着Y轴(图3)实时、持续的车辆运动控制,主要为转向控制。
§
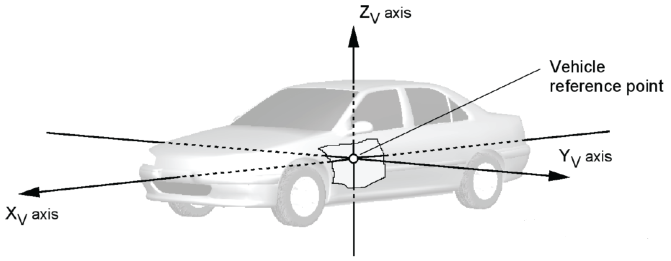
图 3 车辆运动参考坐标系
§
车辆纵向运动控制:动态驾驶任务中沿着X轴(图3)实时、持续的车辆运动控制,主要为加速及减速控制。
车辆运动控制与OEDR(目标和事件探测与响应Object and Event Dection and Reponse)组合就形成了完整的动态驾驶任务DDT。
DDT的上层输入为:策略性功能Strategic functions,具体包括行程规划、目的地和路径选择等导航类功能。
以上三层驾驶任务的作用时间分别为:
Strategic functions:10s~;
Tactical functions:(1~10)s;
Operational functions:(0.01~0.1)s。
三、总结
将自动驾驶系统所承担的主要驾驶任务(DDT+DDT fallback)与系统设计运行区域ODD进行组合可以定义系统的自动化等级,也可以详细定义自动驾驶系统的功能,本系列后续将进行讨论。 |
 苏公网安备 32011602010251号
苏公网安备 32011602010251号 